KEBUTUHAN PERANGKAT
- Arduino (uno)
- sensor ultrasonic (HC-SR04)
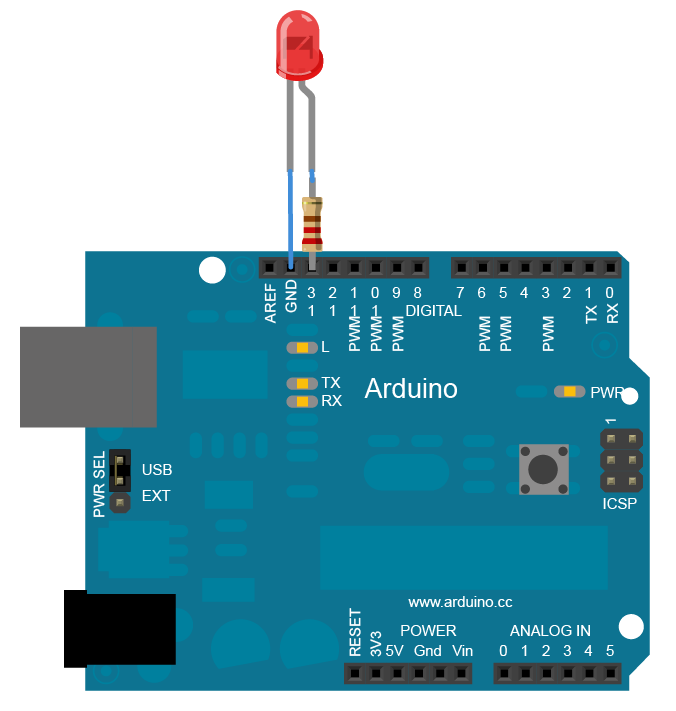
- kabel jumper (warna-warni)
- mokit/gunpla/figure statue. Dalam tutorial ini, penulis menggunakan figure statue bust ironman yang memiliki LED di MATA dan ARC REACTOR-nya. Figure statue yang digunakan ini sudah memiliki rangkaian internal yang menggunakan tenaga batere yang secara terus-menerus akan menyala jika sudah di-ON-kan. Tapi kalo hanya seperti itu, kurang menarik kan? Selain itu juga tidak hemat energi.
- TIPS: Untuk menghubungkan titik satu ke titik lainnya yang berjauhan, silakan gunakan kabel jumper dengan warna kesukaanmu. Akan tetapi, sebaiknya gunakan warna tertentu untuk membedakan arus positif dan negatif.

{kind=link}

KODE
Setelah membuat rangkaian sirkuitnya:
- sambungkan Arduino ke komputer
- jalankan Arduino Software (IDE). Jika belum terinstal, silakan didownload disini.
- masukkan kode berikut:
// ---------------------------------------------------------------------------
// LED-ON using Sonar
// ---------------------------------------------------------------------------
#include <NewPing.h>
#define LED_PIN 13 // Arduino pin tied to trigger pin on LED.
#define TRIGGER_PIN 12 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN 11 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
#define REQUIRE_DISTANCE 20 // // cm - maximal required distance to triger LED
#define MAX_INTERVAL_ON 5000 // ms - change this value for LED interval
bool bON = false;
int distance = 0;
unsigned long ulFirstCT = 0;
unsigned long ulCT = 0;
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
void setup() {
while (!Serial) delay(1);
Serial.begin(9600);
pinMode(LED_PIN, OUTPUT);
DoLED(LOW);
}
void loop() {
// sonar
distance = sonar.ping_cm();
//Serial.println("d = " + String(distance)); // uncomment for DEBUGGING
if (distance > 0 && distance <= REQUIRE_DISTANCE) {
if (!bON) {
// light-UP
DoLED(HIGH);
ulFirstCT = millis();
}
bON = true;
}
else { // not in range
bON = false;
}
// check ON-timer
if (!bON) {
ulCT = millis();
if (ulCT - ulFirstCT >= MAX_INTERVAL_ON) {
DoLED(LOW);
bON = false;
}
}
// breathe
delay(5);
}
void DoLED(int state) {
digitalWrite(LED_PIN, state);
}
- TIPS: untuk NewPing library dapat didownload disini.
VIDEO
Video hasil tutorial ini dapat dilihat YouTube:
Selamat mencoba!
No comments:
Post a Comment